In continuum mechanics , the most commonly used measure of stress is the Cauchy stress tensor , often called simply the stress tensor or "true stress". However, several alternative measures of stress can be defined:[ 1] [ 2] [ 3]
The Kirchhoff stress (
τ
{\displaystyle {\boldsymbol {\tau }}}
The nominal stress (
N
{\displaystyle {\boldsymbol {N}}}
The Piola–Kirchhoff stress tensors
The first Piola–Kirchhoff stress (
P
{\displaystyle {\boldsymbol {P}}}
P
=
N
T
{\displaystyle {\boldsymbol {P}}={\boldsymbol {N}}^{T}}
The second Piola–Kirchhoff stress or PK2 stress (
S
{\displaystyle {\boldsymbol {S}}}
The Biot stress (
T
{\displaystyle {\boldsymbol {T}}}
Definitions
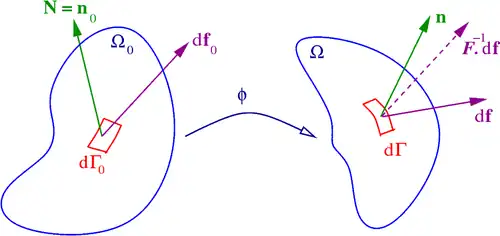
Consider the situation shown in the following figure. The following definitions use the notations shown in the figure.
Quantities used in the definition of stress measures
In the reference configuration
Ω
0
{\displaystyle \Omega _{0}}
d
Γ
0
{\displaystyle d\Gamma _{0}}
N
≡
n
0
{\displaystyle \mathbf {N} \equiv \mathbf {n} _{0}}
t
0
{\displaystyle \mathbf {t} _{0}}
d
f
0
{\displaystyle d\mathbf {f} _{0}}
Ω
{\displaystyle \Omega }
d
Γ
{\displaystyle d\Gamma }
n
{\displaystyle \mathbf {n} }
t
{\displaystyle \mathbf {t} }
d
f
{\displaystyle d\mathbf {f} }
F
{\displaystyle {\boldsymbol {F}}}
deformation gradient tensor ,
J
{\displaystyle J}
Cauchy stress
The Cauchy stress (or true stress) is a measure of the force acting on an element of area in the deformed configuration. This tensor is symmetric and is defined via
d
f
=
t
d
Γ
=
σ
T
⋅
n
d
Γ
{\displaystyle d\mathbf {f} =\mathbf {t} ~d\Gamma ={\boldsymbol {\sigma }}^{T}\cdot \mathbf {n} ~d\Gamma }
or
t
=
σ
T
⋅
n
{\displaystyle \mathbf {t} ={\boldsymbol {\sigma }}^{T}\cdot \mathbf {n} }
where
t
{\displaystyle \mathbf {t} }
n
{\displaystyle \mathbf {n} }
Kirchhoff stress
The quantity,
τ
=
J
σ
{\displaystyle {\boldsymbol {\tau }}=J~{\boldsymbol {\sigma }}}
is called the Kirchhoff stress tensor , with
J
{\displaystyle J}
F
{\displaystyle {\boldsymbol {F}}}
weighted Cauchy stress tensor as well.
The nominal stress
N
=
P
T
{\displaystyle {\boldsymbol {N}}={\boldsymbol {P}}^{T}}
P
{\displaystyle {\boldsymbol {P}}}
d
f
=
t
d
Γ
=
N
T
⋅
n
0
d
Γ
0
=
P
⋅
n
0
d
Γ
0
{\displaystyle d\mathbf {f} =\mathbf {t} ~d\Gamma ={\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}={\boldsymbol {P}}\cdot \mathbf {n} _{0}~d\Gamma _{0}}
or
t
0
=
t
d
Γ
d
Γ
0
=
N
T
⋅
n
0
=
P
⋅
n
0
{\displaystyle \mathbf {t} _{0}=\mathbf {t} {\dfrac {d{\Gamma }}{d\Gamma _{0}}}={\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}={\boldsymbol {P}}\cdot \mathbf {n} _{0}}
This stress is unsymmetric and is a two-point tensor like the deformation gradient.[ 4]
If we pull back
d
f
{\displaystyle d\mathbf {f} }
d
f
0
{\displaystyle d\mathbf {f} _{0}}
d
f
0
=
F
−
1
⋅
d
f
{\displaystyle d\mathbf {f} _{0}={\boldsymbol {F}}^{-1}\cdot d\mathbf {f} }
or,
d
f
0
=
F
−
1
⋅
N
T
⋅
n
0
d
Γ
0
=
F
−
1
⋅
t
0
d
Γ
0
{\displaystyle d\mathbf {f} _{0}={\boldsymbol {F}}^{-1}\cdot {\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}={\boldsymbol {F}}^{-1}\cdot \mathbf {t} _{0}~d\Gamma _{0}}
The PK2 stress (
S
{\displaystyle {\boldsymbol {S}}}
d
f
0
=
S
T
⋅
n
0
d
Γ
0
=
F
−
1
⋅
t
0
d
Γ
0
{\displaystyle d\mathbf {f} _{0}={\boldsymbol {S}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}={\boldsymbol {F}}^{-1}\cdot \mathbf {t} _{0}~d\Gamma _{0}}
Therefore,
S
T
⋅
n
0
=
F
−
1
⋅
t
0
{\displaystyle {\boldsymbol {S}}^{T}\cdot \mathbf {n} _{0}={\boldsymbol {F}}^{-1}\cdot \mathbf {t} _{0}}
Biot stress
The Biot stress is useful because it is energy conjugate to the right stretch tensor
U
{\displaystyle {\boldsymbol {U}}}
P
T
⋅
R
{\displaystyle {\boldsymbol {P}}^{T}\cdot {\boldsymbol {R}}}
R
{\displaystyle {\boldsymbol {R}}}
polar decomposition of the deformation gradient. Therefore, the Biot stress tensor is defined as
T
=
1
2
(
R
T
⋅
P
+
P
T
⋅
R
)
.
{\displaystyle {\boldsymbol {T}}={\tfrac {1}{2}}({\boldsymbol {R}}^{T}\cdot {\boldsymbol {P}}+{\boldsymbol {P}}^{T}\cdot {\boldsymbol {R}})~.}
The Biot stress is also called the Jaumann stress.
The quantity
T
{\displaystyle {\boldsymbol {T}}}
R
T
d
f
=
(
P
T
⋅
R
)
T
⋅
n
0
d
Γ
0
{\displaystyle {\boldsymbol {R}}^{T}~d\mathbf {f} =({\boldsymbol {P}}^{T}\cdot {\boldsymbol {R}})^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}}
Relations
Relations between Cauchy stress and nominal stress
From Nanson's formula relating areas in the reference and deformed configurations:
n
d
Γ
=
J
F
−
T
⋅
n
0
d
Γ
0
{\displaystyle \mathbf {n} ~d\Gamma =J~{\boldsymbol {F}}^{-T}\cdot \mathbf {n} _{0}~d\Gamma _{0}}
Now,
σ
T
⋅
n
d
Γ
=
d
f
=
N
T
⋅
n
0
d
Γ
0
{\displaystyle {\boldsymbol {\sigma }}^{T}\cdot \mathbf {n} ~d\Gamma =d\mathbf {f} ={\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}}
Hence,
σ
T
⋅
(
J
F
−
T
⋅
n
0
d
Γ
0
)
=
N
T
⋅
n
0
d
Γ
0
{\displaystyle {\boldsymbol {\sigma }}^{T}\cdot (J~{\boldsymbol {F}}^{-T}\cdot \mathbf {n} _{0}~d\Gamma _{0})={\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}}
or,
N
T
=
J
(
F
−
1
⋅
σ
)
T
=
J
σ
T
⋅
F
−
T
{\displaystyle {\boldsymbol {N}}^{T}=J~({\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\sigma }})^{T}=J~{\boldsymbol {\sigma }}^{T}\cdot {\boldsymbol {F}}^{-T}}
or,
N
=
J
F
−
1
⋅
σ
and
N
T
=
P
=
J
σ
T
⋅
F
−
T
{\displaystyle {\boldsymbol {N}}=J~{\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\sigma }}\qquad {\text{and}}\qquad {\boldsymbol {N}}^{T}={\boldsymbol {P}}=J~{\boldsymbol {\sigma }}^{T}\cdot {\boldsymbol {F}}^{-T}}
In index notation,
N
I
j
=
J
F
I
k
−
1
σ
k
j
and
P
i
J
=
J
σ
k
i
F
J
k
−
1
{\displaystyle N_{Ij}=J~F_{Ik}^{-1}~\sigma _{kj}\qquad {\text{and}}\qquad P_{iJ}=J~\sigma _{ki}~F_{Jk}^{-1}}
Therefore,
J
σ
=
F
⋅
N
=
F
⋅
P
T
.
{\displaystyle J~{\boldsymbol {\sigma }}={\boldsymbol {F}}\cdot {\boldsymbol {N}}={\boldsymbol {F}}\cdot {\boldsymbol {P}}^{T}~.}
Note that
N
{\displaystyle {\boldsymbol {N}}}
P
{\displaystyle {\boldsymbol {P}}}
F
{\displaystyle {\boldsymbol {F}}}
Recall that
N
T
⋅
n
0
d
Γ
0
=
d
f
{\displaystyle {\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0}=d\mathbf {f} }
and
d
f
=
F
⋅
d
f
0
=
F
⋅
(
S
T
⋅
n
0
d
Γ
0
)
{\displaystyle d\mathbf {f} ={\boldsymbol {F}}\cdot d\mathbf {f} _{0}={\boldsymbol {F}}\cdot ({\boldsymbol {S}}^{T}\cdot \mathbf {n} _{0}~d\Gamma _{0})}
Therefore,
N
T
⋅
n
0
=
F
⋅
S
T
⋅
n
0
{\displaystyle {\boldsymbol {N}}^{T}\cdot \mathbf {n} _{0}={\boldsymbol {F}}\cdot {\boldsymbol {S}}^{T}\cdot \mathbf {n} _{0}}
or (using the symmetry of
S
{\displaystyle {\boldsymbol {S}}}
N
=
S
⋅
F
T
and
P
=
F
⋅
S
{\displaystyle {\boldsymbol {N}}={\boldsymbol {S}}\cdot {\boldsymbol {F}}^{T}\qquad {\text{and}}\qquad {\boldsymbol {P}}={\boldsymbol {F}}\cdot {\boldsymbol {S}}}
In index notation,
N
I
j
=
S
I
K
F
j
K
T
and
P
i
J
=
F
i
K
S
K
J
{\displaystyle N_{Ij}=S_{IK}~F_{jK}^{T}\qquad {\text{and}}\qquad P_{iJ}=F_{iK}~S_{KJ}}
Alternatively, we can write
S
=
N
⋅
F
−
T
and
S
=
F
−
1
⋅
P
{\displaystyle {\boldsymbol {S}}={\boldsymbol {N}}\cdot {\boldsymbol {F}}^{-T}\qquad {\text{and}}\qquad {\boldsymbol {S}}={\boldsymbol {F}}^{-1}\cdot {\boldsymbol {P}}}
Recall that
N
=
J
F
−
1
⋅
σ
{\displaystyle {\boldsymbol {N}}=J~{\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\sigma }}}
In terms of the 2nd PK stress, we have
S
⋅
F
T
=
J
F
−
1
⋅
σ
{\displaystyle {\boldsymbol {S}}\cdot {\boldsymbol {F}}^{T}=J~{\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\sigma }}}
Therefore,
S
=
J
F
−
1
⋅
σ
⋅
F
−
T
=
F
−
1
⋅
τ
⋅
F
−
T
{\displaystyle {\boldsymbol {S}}=J~{\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\sigma }}\cdot {\boldsymbol {F}}^{-T}={\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\tau }}\cdot {\boldsymbol {F}}^{-T}}
In index notation,
S
I
J
=
F
I
k
−
1
τ
k
l
F
J
l
−
1
{\displaystyle S_{IJ}=F_{Ik}^{-1}~\tau _{kl}~F_{Jl}^{-1}}
Since the Cauchy stress (and hence the Kirchhoff stress) is symmetric, the 2nd PK stress is also symmetric.
Alternatively, we can write
σ
=
J
−
1
F
⋅
S
⋅
F
T
{\displaystyle {\boldsymbol {\sigma }}=J^{-1}~{\boldsymbol {F}}\cdot {\boldsymbol {S}}\cdot {\boldsymbol {F}}^{T}}
or,
τ
=
F
⋅
S
⋅
F
T
.
{\displaystyle {\boldsymbol {\tau }}={\boldsymbol {F}}\cdot {\boldsymbol {S}}\cdot {\boldsymbol {F}}^{T}~.}
Clearly, from definition of the push-forward and pull-back operations, we have
S
=
φ
∗
[
τ
]
=
F
−
1
⋅
τ
⋅
F
−
T
{\displaystyle {\boldsymbol {S}}=\varphi ^{*}[{\boldsymbol {\tau }}]={\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\tau }}\cdot {\boldsymbol {F}}^{-T}}
and
τ
=
φ
∗
[
S
]
=
F
⋅
S
⋅
F
T
.
{\displaystyle {\boldsymbol {\tau }}=\varphi _{*}[{\boldsymbol {S}}]={\boldsymbol {F}}\cdot {\boldsymbol {S}}\cdot {\boldsymbol {F}}^{T}~.}
Therefore,
S
{\displaystyle {\boldsymbol {S}}}
τ
{\displaystyle {\boldsymbol {\tau }}}
F
{\displaystyle {\boldsymbol {F}}}
τ
{\displaystyle {\boldsymbol {\tau }}}
S
{\displaystyle {\boldsymbol {S}}}
Key:
J
=
det
(
F
)
,
C
=
F
T
F
=
U
2
,
F
=
R
U
,
R
T
=
R
−
1
,
{\displaystyle J=\det \left({\boldsymbol {F}}\right),\quad {\boldsymbol {C}}={\boldsymbol {F}}^{T}{\boldsymbol {F}}={\boldsymbol {U}}^{2},\quad {\boldsymbol {F}}={\boldsymbol {R}}{\boldsymbol {U}},\quad {\boldsymbol {R}}^{T}={\boldsymbol {R}}^{-1},}
P
=
J
σ
F
−
T
,
τ
=
J
σ
,
S
=
J
F
−
1
σ
F
−
T
,
T
=
R
T
P
,
M
=
C
S
{\displaystyle {\boldsymbol {P}}=J{\boldsymbol {\sigma }}{\boldsymbol {F}}^{-T},\quad {\boldsymbol {\tau }}=J{\boldsymbol {\sigma }},\quad {\boldsymbol {S}}=J{\boldsymbol {F}}^{-1}{\boldsymbol {\sigma }}{\boldsymbol {F}}^{-T},\quad {\boldsymbol {T}}={\boldsymbol {R}}^{T}{\boldsymbol {P}},\quad {\boldsymbol {M}}={\boldsymbol {C}}{\boldsymbol {S}}}
Conversion formulae
Equation for
σ
{\displaystyle {\boldsymbol {\sigma }}}
τ
{\displaystyle {\boldsymbol {\tau }}}
P
{\displaystyle {\boldsymbol {P}}}
S
{\displaystyle {\boldsymbol {S}}}
T
{\displaystyle {\boldsymbol {T}}}
M
{\displaystyle {\boldsymbol {M}}}
σ
=
{\displaystyle {\boldsymbol {\sigma }}=\,}
σ
{\displaystyle {\boldsymbol {\sigma }}}
J
−
1
τ
{\displaystyle J^{-1}{\boldsymbol {\tau }}}
J
−
1
P
F
T
{\displaystyle J^{-1}{\boldsymbol {P}}{\boldsymbol {F}}^{T}}
J
−
1
F
S
F
T
{\displaystyle J^{-1}{\boldsymbol {F}}{\boldsymbol {S}}{\boldsymbol {F}}^{T}}
J
−
1
R
T
F
T
{\displaystyle J^{-1}{\boldsymbol {R}}{\boldsymbol {T}}{\boldsymbol {F}}^{T}}
J
−
1
F
−
T
M
F
T
{\displaystyle J^{-1}{\boldsymbol {F}}^{-T}{\boldsymbol {M}}{\boldsymbol {F}}^{T}}
τ
=
{\displaystyle {\boldsymbol {\tau }}=\,}
J
σ
{\displaystyle J{\boldsymbol {\sigma }}}
τ
{\displaystyle {\boldsymbol {\tau }}}
P
F
T
{\displaystyle {\boldsymbol {P}}{\boldsymbol {F}}^{T}}
F
S
F
T
{\displaystyle {\boldsymbol {F}}{\boldsymbol {S}}{\boldsymbol {F}}^{T}}
R
T
F
T
{\displaystyle {\boldsymbol {R}}{\boldsymbol {T}}{\boldsymbol {F}}^{T}}
F
−
T
M
F
T
{\displaystyle {\boldsymbol {F}}^{-T}{\boldsymbol {M}}{\boldsymbol {F}}^{T}}
P
=
{\displaystyle {\boldsymbol {P}}=\,}
J
σ
F
−
T
{\displaystyle J{\boldsymbol {\sigma }}{\boldsymbol {F}}^{-T}}
τ
F
−
T
{\displaystyle {\boldsymbol {\tau }}{\boldsymbol {F}}^{-T}}
P
{\displaystyle {\boldsymbol {P}}}
F
S
{\displaystyle {\boldsymbol {F}}{\boldsymbol {S}}}
R
T
{\displaystyle {\boldsymbol {R}}{\boldsymbol {T}}}
F
−
T
M
{\displaystyle {\boldsymbol {F}}^{-T}{\boldsymbol {M}}}
S
=
{\displaystyle {\boldsymbol {S}}=\,}
J
F
−
1
σ
F
−
T
{\displaystyle J{\boldsymbol {F}}^{-1}{\boldsymbol {\sigma }}{\boldsymbol {F}}^{-T}}
F
−
1
τ
F
−
T
{\displaystyle {\boldsymbol {F}}^{-1}{\boldsymbol {\tau }}{\boldsymbol {F}}^{-T}}
F
−
1
P
{\displaystyle {\boldsymbol {F}}^{-1}{\boldsymbol {P}}}
S
{\displaystyle {\boldsymbol {S}}}
U
−
1
T
{\displaystyle {\boldsymbol {U}}^{-1}{\boldsymbol {T}}}
C
−
1
M
{\displaystyle {\boldsymbol {C}}^{-1}{\boldsymbol {M}}}
T
=
{\displaystyle {\boldsymbol {T}}=\,}
J
R
T
σ
F
−
T
{\displaystyle J{\boldsymbol {R}}^{T}{\boldsymbol {\sigma }}{\boldsymbol {F}}^{-T}}
R
T
τ
F
−
T
{\displaystyle {\boldsymbol {R}}^{T}{\boldsymbol {\tau }}{\boldsymbol {F}}^{-T}}
R
T
P
{\displaystyle {\boldsymbol {R}}^{T}{\boldsymbol {P}}}
U
S
{\displaystyle {\boldsymbol {U}}{\boldsymbol {S}}}
T
{\displaystyle {\boldsymbol {T}}}
U
−
1
M
{\displaystyle {\boldsymbol {U}}^{-1}{\boldsymbol {M}}}
M
=
{\displaystyle {\boldsymbol {M}}=\,}
J
F
T
σ
F
−
T
{\displaystyle J{\boldsymbol {F}}^{T}{\boldsymbol {\sigma }}{\boldsymbol {F}}^{-T}}
F
T
τ
F
−
T
{\displaystyle {\boldsymbol {F}}^{T}{\boldsymbol {\tau }}{\boldsymbol {F}}^{-T}}
F
T
P
{\displaystyle {\boldsymbol {F}}^{T}{\boldsymbol {P}}}
C
S
{\displaystyle {\boldsymbol {C}}{\boldsymbol {S}}}
U
T
{\displaystyle {\boldsymbol {U}}{\boldsymbol {T}}}
M
{\displaystyle {\boldsymbol {M}}}
See also
References
^ J. Bonet and R. W. Wood, Nonlinear Continuum Mechanics for Finite Element Analysis , Cambridge University Press.
^ R. W. Ogden, 1984, Non-linear Elastic Deformations , Dover.
^ L. D. Landau, E. M. Lifshitz, Theory of Elasticity , third edition
^ Three-Dimensional Elasticity ISBN 978-0-08-087541-5 . 



















































![{\displaystyle {\boldsymbol {S}}=\varphi ^{*}[{\boldsymbol {\tau }}]={\boldsymbol {F}}^{-1}\cdot {\boldsymbol {\tau }}\cdot {\boldsymbol {F}}^{-T}}](./_assets_/a4d5f37efb8297f33270efe322adaabf46099ee9.svg)
![{\displaystyle {\boldsymbol {\tau }}=\varphi _{*}[{\boldsymbol {S}}]={\boldsymbol {F}}\cdot {\boldsymbol {S}}\cdot {\boldsymbol {F}}^{T}~.}](./_assets_/c3b707f11a8c67a3409dd4df7e6448d0ee9444cb.svg)







































